ROSサンプル集の実行
このページでは以下の3つのサンプル実行方法を説明します。
- Raspberry Pi Mouseと共通のROSサンプル集(rt-net/raspimouse_ros_examples)
- Jetson Nano Mouse用のROSサンプル集(rt-net/jnmouse_ros_examples)
- SLAM/ナビゲーション用のROSサンプル集(rt-net/raspimouse_slam_navigation_ros)
サンプルを実行する場合は下記コマンドを実行し、 ROSとパッケージを読み込んでください。
$ source /opt/ros/melodic/setup.bash
$ source ~/catkin_ws/devel/setup.bash
Jetson NanoとPC間のROSネットワークを接続する
環境変数ROS_IP、ROS_MASTER_URIを設定することで、
PCからネットワークを介してJetson Nano側のトピックやサービスにアクセスできます。
Jetson NanoのIPアドレスが192.168.11.89、
PCのIPアドレスが192.168.11.100のとき、
下記コマンドで環境変数を設定します。
# Jetson Nano側
$ export ROS_IP=192.168.11.89
$ export ROS_MASTER_URI=http://192.168.11.89:11311/
# PC側
# ROS_MASTER_URIにはJetson NanoのIPアドレスを入力する
$ export ROS_IP=192.168.11.100
$ export ROS_MASTER_URI=http://192.168.11.89:11311/
ネットワーク接続を切る場合は、
ROS_MASTER_URIをデフォルトのhttp://localhost:11311/に戻します。
raspimouse_ros_examples
キーボードで操縦する
実行手順はROS サンプル集のkeyboard_control を参照してください。 PCから操縦する場合はネットワークと環境変数を設定してください。
ジョイスティックコントローラで操縦する
実行手順はROS サンプル集のjoystick_control を参照してください。 PCから操縦する場合はネットワークと環境変数を設定してください。
※動画はRaspberry Pi MouseですがJetson Nano Mouseでも同様です。
IMUで角度制御
実行手順はROS サンプル集のdirection_control を参照してください。
※動画はRaspberry Pi MouseですがJetson Nano Mouseでも同様です。
※LiDARマウントはJetson Nano Mouse用のものを用意してください。(ショップページ)
jnmouse_ros_examples
ライントレース
実行手順はサンプル集パッケージを参照してください。
詳細はブログ(https://rt-net.jp/mobility/archives/15597)に記載しています。
スマホVRでJetson Nano Mouseを操作
実行手順はサンプル集パッケージを参照してください。
詳細はブログ(https://rt-net.jp/mobility/archives/16161)に記載しています。

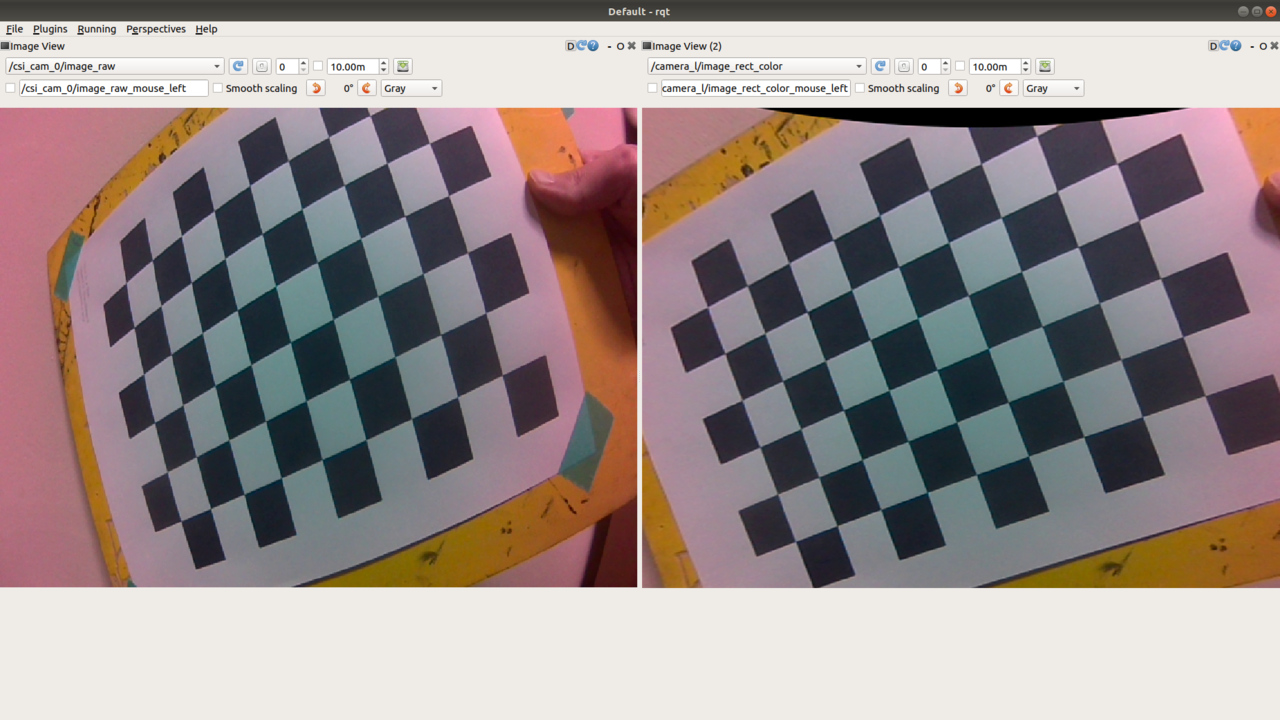
ステレオカメラ画像の歪み補正とステレオ平行化
実行手順はサンプル集パッケージを参照してください。
詳細はブログ(https://rt-net.jp/mobility/archives/17588)に記載しています。
ステレオカメラ画像からの深度推定
実行手順はサンプル集パッケージを参照してください。
詳細はブログ(https://rt-net.jp/mobility/archives/18036)に記載しています。
raspimouse_slam_navigation_ros
LiDARでSLAM
実行手順はSLAMパッケージ を参照してください。 SLAMパッケージをPCで起動する場合はネットワークと環境変数を設定してください。
※動画はRaspberry Pi MouseですがJetson Nano Mouseでも同様です。
※LiDARマウントはJetson Nano Mouse用のものを用意してください。(ショップページ)
LiDARでナビゲーション
実行手順はナビゲーションパッケージ を参照してください。 ナビゲーションパッケージをPCで起動する場合はネットワークと環境変数を設定してください。
※動画はRaspberry Pi MouseですがJetson Nano Mouseでも同様です。
※LiDARマウントはJetson Nano Mouse用のものを用意してください。(ショップページ)