|
RT-AICHIP-sample
|
モーターの回転, 機体データの送信, コマンドの受信
10msec毎に割り込み関数で処理を実行
[詳解]
#include "LPC13xx.h"#include "core_cm3.h"#include "type.h"#include "timer.h"#include "pwm.h"#include "AICHIPFunction.h"#include "UserInterface.h"#include "mpu9150.h"#include "debug.h"#include "uart.h"#include "tinyMathFunction.h"#include "usbTransmission.h"
関数 | |
| void | initAICHIP (void) |
| void | setSendDataEnable (uint8_t en) |
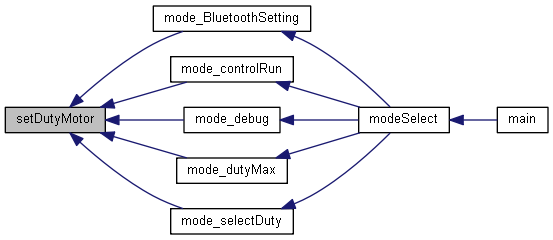
| void | setDutyMotor (float pwm_duty) |
| float | getDutyMotor (void) |
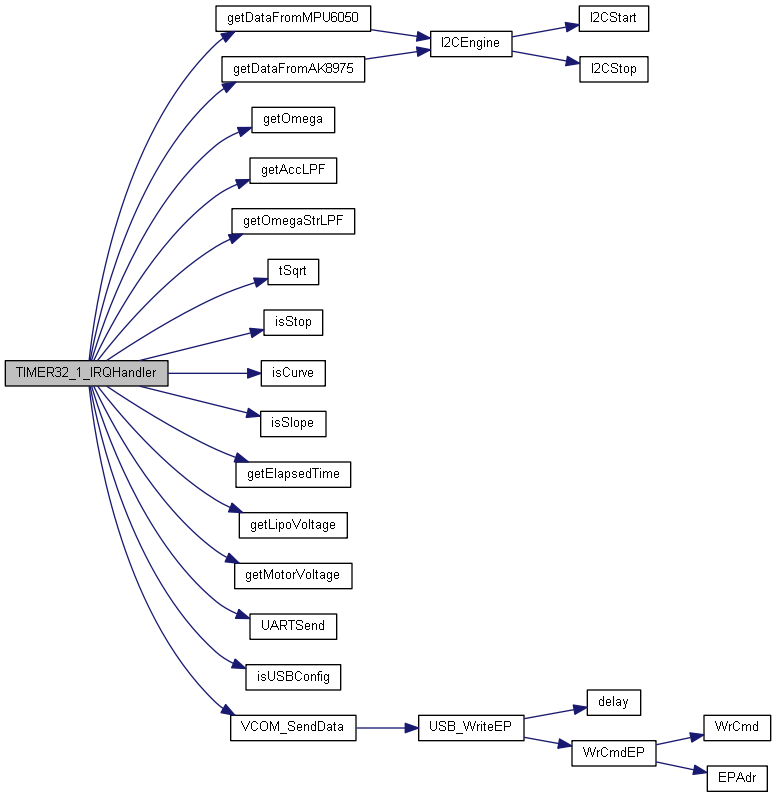
| void | TIMER32_1_IRQHandler (void) |
| float | getDegree (void) |
| void | setDegree (float deg) |
| uint8_t | isStop (void) |
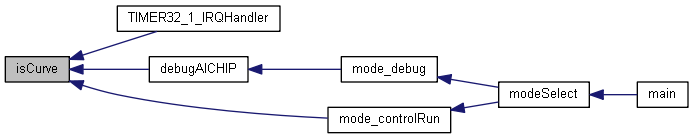
| uint8_t | isCurve (void) |
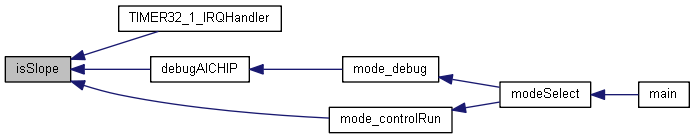
| uint8_t | isSlope (void) |
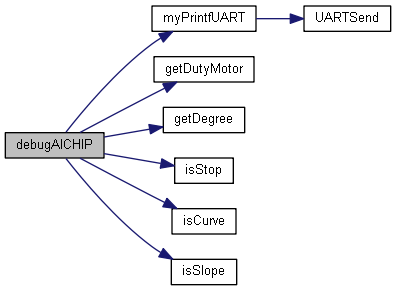
| void | debugAICHIP () |
変数 | |
| volatile uint32_t | UARTCount |
| volatile uint8_t | UARTBuffer [BUFSIZE] |
モーターの回転, 機体データの送信, コマンドの受信
10msec毎に割り込み関数で処理を実行
AICHIPFunction.c に定義があります。
| void debugAICHIP | ( | void | ) |
| float getDegree | ( | void | ) |
| float getDutyMotor | ( | void | ) |
| void initAICHIP | ( | void | ) |
AICHIPFunction.c内の関数を使用できるようにする
| void |
AICHIPFunction.c の 52 行目に定義があります。


| uint8_t isCurve | ( | void | ) |
| uint8_t isSlope | ( | void | ) |
| uint8_t isStop | ( | void | ) |
| void setDegree | ( | float | deg | ) |
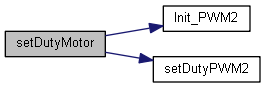
| void setDutyMotor | ( | float | pwm_duty | ) |
モータを指定したdutyで回転させる
| pwm_duty | -1.0 to 1.0 |
AICHIPFunction.c の 101 行目に定義があります。
| void setSendDataEnable | ( | uint8_t | en | ) |
| void TIMER32_1_IRQHandler | ( | void | ) |
10msec毎に行われる処理
| void |
AICHIPFunction.c の 154 行目に定義があります。
 1.8.10
1.8.10