コースの状況に応じてモーターのdutyを変えながら走るモード
////操作////
右SW: スタート,ストップの切り替え
左SW: 長押しでモード選択へ遷移
[詳解]
#include "mode_Debug.h"#include "type.h"#include "AICHIPFunction.h"#include "UserInterface.h"#include "SystemTickTimer.h"#include "debug.h"#include "ad.h"
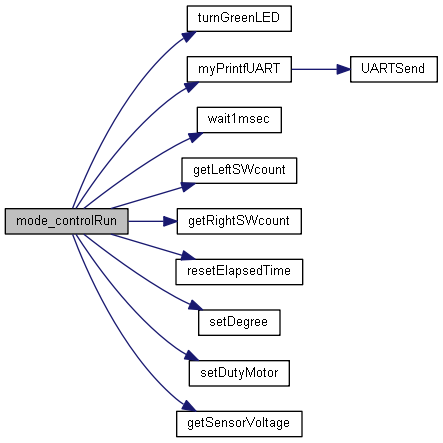
mode_controlRun.c の依存先関係図:

関数 | |
| float | abs_debug (float) |
| void | mode_controlRun (void) |
詳解
コースの状況に応じてモーターのdutyを変えながら走るモード
////操作////
右SW: スタート,ストップの切り替え
左SW: 長押しでモード選択へ遷移
関数詳解
◆ abs_debug()
| float abs_debug | ( | float | val_x | ) |
◆ mode_controlRun()
| void mode_controlRun | ( | void | ) |
呼び出し関係図: