иў«дҫқеӯҳй–ўдҝӮеӣі:

й–ўж•° | |
| void | initAICHIP (void) |
| void | setSendDataEnable (uint8_t en) |
| void | setDutyMotor (float pwm_duty) |
| float | getDutyMotor (void) |
| void | setDutyRate (float targetDuty, float dutyRate) |
| float | getDegree (void) |
| void | setDegree (float deg) |
| uint8_t | isStop (void) |
| uint8_t | isCurve (void) |
| uint8_t | isSlope (void) |
| void | debugAICHIP (void) |
й–ўж•°и©іи§Ј
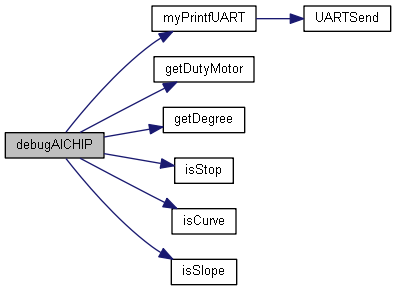
◆ debugAICHIP()
| void debugAICHIP | ( | void | ) |
гғҮгғҗгғғгӮ°з”Ёй–ўж•°
- еј•ж•°
-
void
- жҲ»гӮҠеҖӨ
- void
е‘јгҒіеҮәгҒ—й–ўдҝӮеӣі:
иў«е‘јгҒіеҮәгҒ—й–ўдҝӮеӣі:

◆ getDegree()
| float getDegree | ( | void | ) |
зҸҫеңЁгҒ®и§’еәҰгӮ’иҝ”гҒҷ
- еј•ж•°
-
void
- жҲ»гӮҠеҖӨ
- void
иў«е‘јгҒіеҮәгҒ—й–ўдҝӮеӣі:

◆ getDutyMotor()
| float getDutyMotor | ( | void | ) |
motorгҒ«иЁӯе®ҡгҒ—гҒҹзҸҫеңЁгҒ®dutyгӮ’иҝ”гҒҷ
- еј•ж•°
-
void
- жҲ»гӮҠеҖӨ
- зҸҫеңЁгҒ®duty -1.0гҒӢгӮү1.0
иў«е‘јгҒіеҮәгҒ—й–ўдҝӮеӣі:

◆ initAICHIP()
| void initAICHIP | ( | void | ) |
AICHIPFunction.cеҶ…гҒ®й–ўж•°гӮ’дҪҝз”ЁгҒ§гҒҚгӮӢгӮҲгҒҶгҒ«гҒҷгӮӢ
- еј•ж•°
-
void
- жҲ»гӮҠеҖӨ
- void
е‘јгҒіеҮәгҒ—й–ўдҝӮеӣі:

иў«е‘јгҒіеҮәгҒ—й–ўдҝӮеӣі:

◆ isCurve()
| uint8_t isCurve | ( | void | ) |
гӮ«гғјгғ–гҒ—гҒҰгҒ„гӮӢгҒӢгҒ©гҒҶгҒӢгӮ’иҝ”гҒҷ
- еј•ж•°
-
void
- жҲ»гӮҠеҖӨ
- void
иў«е‘јгҒіеҮәгҒ—й–ўдҝӮеӣі:

◆ isSlope()
| uint8_t isSlope | ( | void | ) |
ж–ңйқўгҒ«гҒ„гӮӢгҒӢгҒ©гҒҶгҒӢгӮ’иҝ”гҒҷ
- еј•ж•°
-
void
- жҲ»гӮҠеҖӨ
- void
иў«е‘јгҒіеҮәгҒ—й–ўдҝӮеӣі:

◆ isStop()
| uint8_t isStop | ( | void | ) |
йқҷжӯўзҠ¶ж…ӢгҒӢгҒ©гҒҶгҒӢгӮ’иҝ”гҒҷ
- еј•ж•°
-
void
- жҲ»гӮҠеҖӨ
- void
иў«е‘јгҒіеҮәгҒ—й–ўдҝӮеӣі:

◆ setDegree()
| void setDegree | ( | float | deg | ) |
и§’еәҰгӮ’гӮ»гғғгғҲгҒҷгӮӢ
- еј•ж•°
-
deg [radian]
- жҲ»гӮҠеҖӨ
- void
иў«е‘јгҒіеҮәгҒ—й–ўдҝӮеӣі:

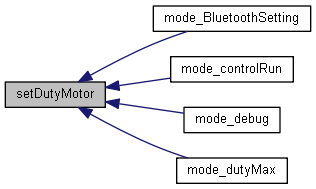
◆ setDutyMotor()
| void setDutyMotor | ( | float | pwm_duty | ) |
гғўгғјгӮҝгӮ’жҢҮе®ҡгҒ—гҒҹdutyгҒ§еӣһи»ўгҒ•гҒӣгӮӢ
- еј•ж•°
-
pwm_duty -1.0 to 1.0
- жҲ»гӮҠеҖӨ
- void
иў«е‘јгҒіеҮәгҒ—й–ўдҝӮеӣі:
◆ setDutyRate()
| void setDutyRate | ( | float | targetDuty, |
| float | dutyRate | ||
| ) |
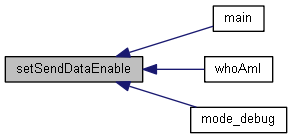
◆ setSendDataEnable()
| void setSendDataEnable | ( | uint8_t | en | ) |
ж©ҹдҪ“гғҮгғјгӮҝгҒ®йҖҒдҝЎгӮ’гҒҷгӮӢгҒӢгҒ©гҒҶгҒӢгӮ’йҒёжҠһ
- еј•ж•°
-
en 1:йҖҒдҝЎ 0:йҖҒдҝЎгҒҳзҰҒжӯў
- жҲ»гӮҠеҖӨ
- void
иў«е‘јгҒіеҮәгҒ—й–ўдҝӮеӣі: